Eyan Documet
Eyan Documet
Mechanical Engineer obsessed with solving high-stakes, highly-technical problems.
Inchworm-Inspired Quasi-Static Robot Feasibility Study
This study validates the locomotion of a two-link serial-chain climber. The objective was to mathematically verify quasi-static movement, ensuring equilibrium and sufficient torque margins throughout the gait without relying on dynamic momentum.
I owned the kinematic derivation, MATLAB simulation environment, and mechanical synthesis.
Note: This page is a summary. Please see Full Motion Analysis & Design Report (Google Slides) for more details.
Skills Demonstrated
- Kinematics & Dynamics: Derived closed-form 2-DoF IK and static force-balance equations to ensure stability.
- Component Validation: Benchmarked motor torque-speed characteristics against predicted operational loads.
- Path Generation: Developed a MATLAB heuristic planner to ensure end-effector trajectories remain within the verified torque-safe envelope.
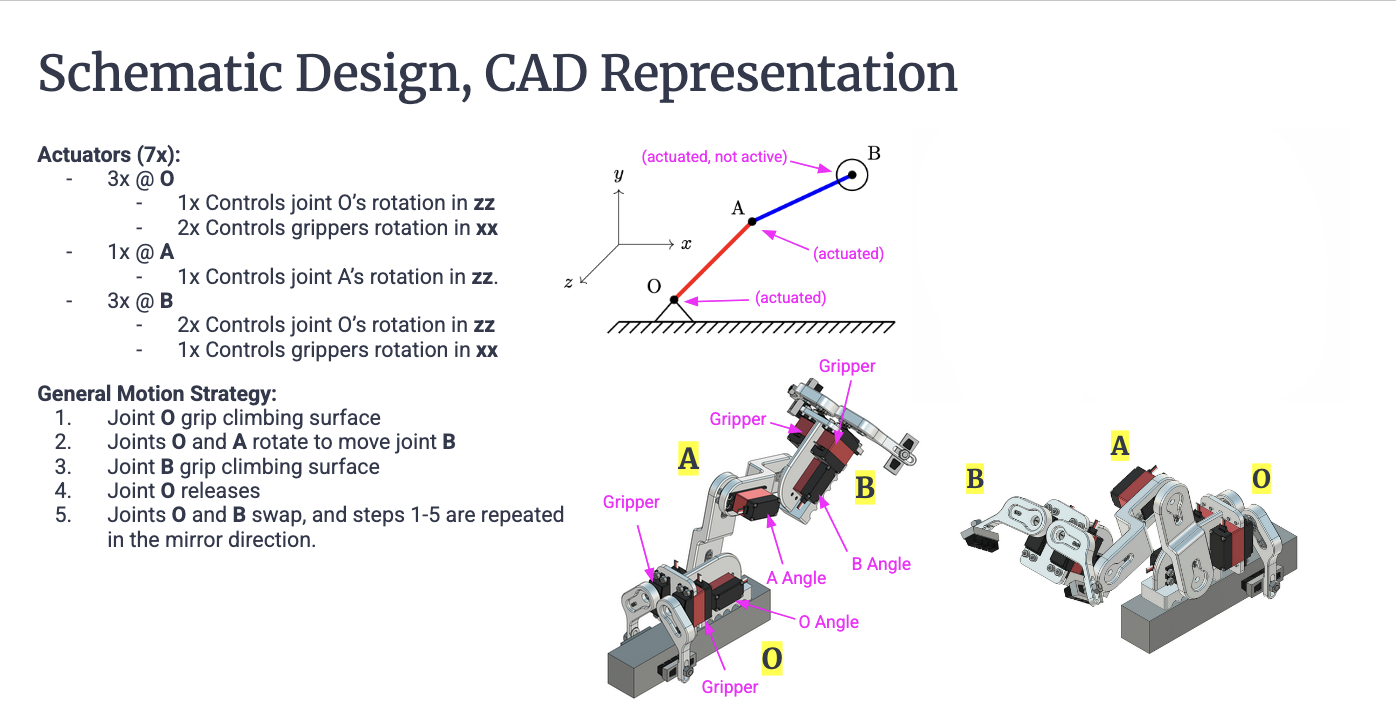
High-Level Strategy
The architecture utilizes a sequential anchoring gait to prioritize mechanical reliability. Complexity was reduced via two strategic benchmarks:
- Attachment Security: Validated gripper-interface load capacity to maintain factor-of-safety limits during transitions.
- Stability: Targeted a quasi-static regime to negate inertial transients, enabling high-fidelity trajectory tracking without the need for active-damping controllers.
Gripper Mechanics: Frictional Anchor Validation
The gripper utilizes a high-friction caliper system with COTS elastomeric pads (rubber-on-steel) to maximize the static friction coefficient ($\mu$).
- Torque Demand: 1.62 Nm (calculated from 1.67kg system mass).
- Available Torque: 4.9 Nm (Dual-actuator configuration).
- Result: 3.02 Factor of Safety (FoS).
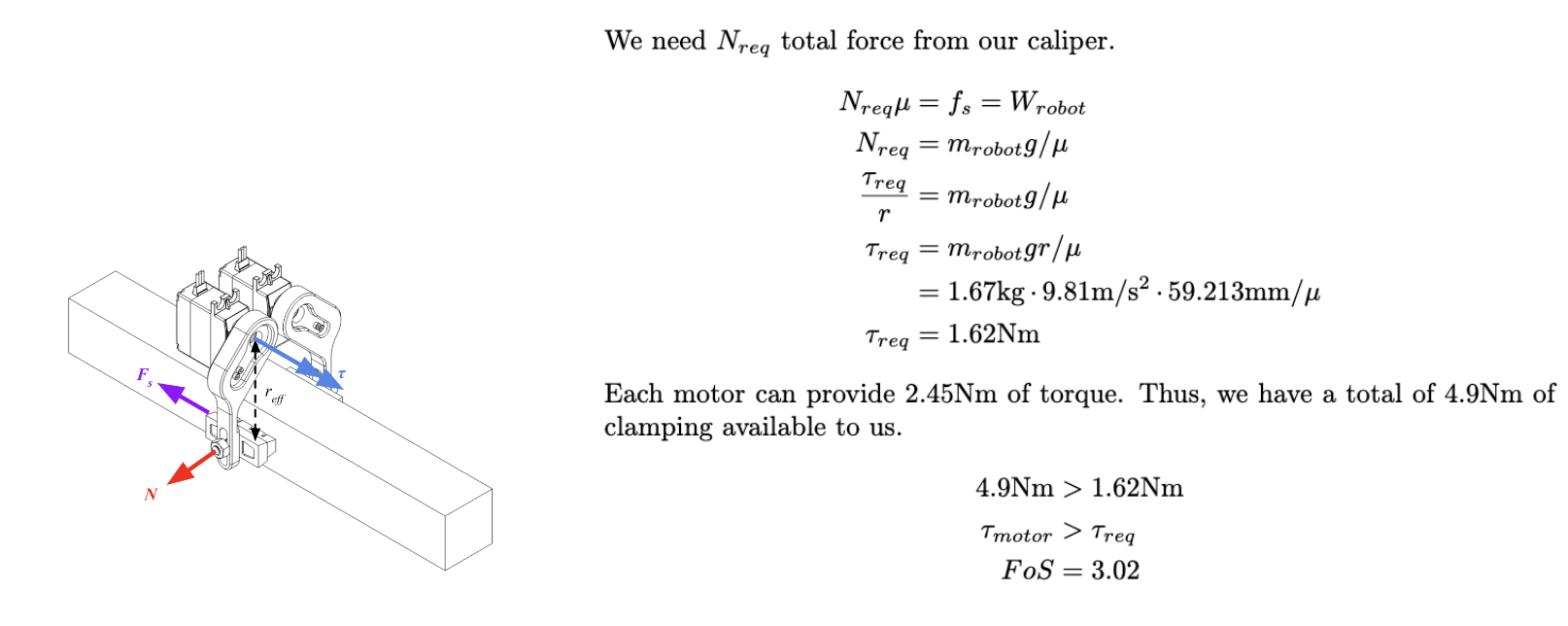
This 3x overhead ensures a rigid anchor against surface variability and dynamic load spikes.
Lagrangian Quasi-Static Verification
I mapped dynamic demands against the actuator’s winding-limited operating space. Modeling confirmed that even at peak velocities, requirements remained 100 N-cm below the winding line. This validates that the system operates entirely within the motor’s linear regime, confirming the quasi-static assumption.
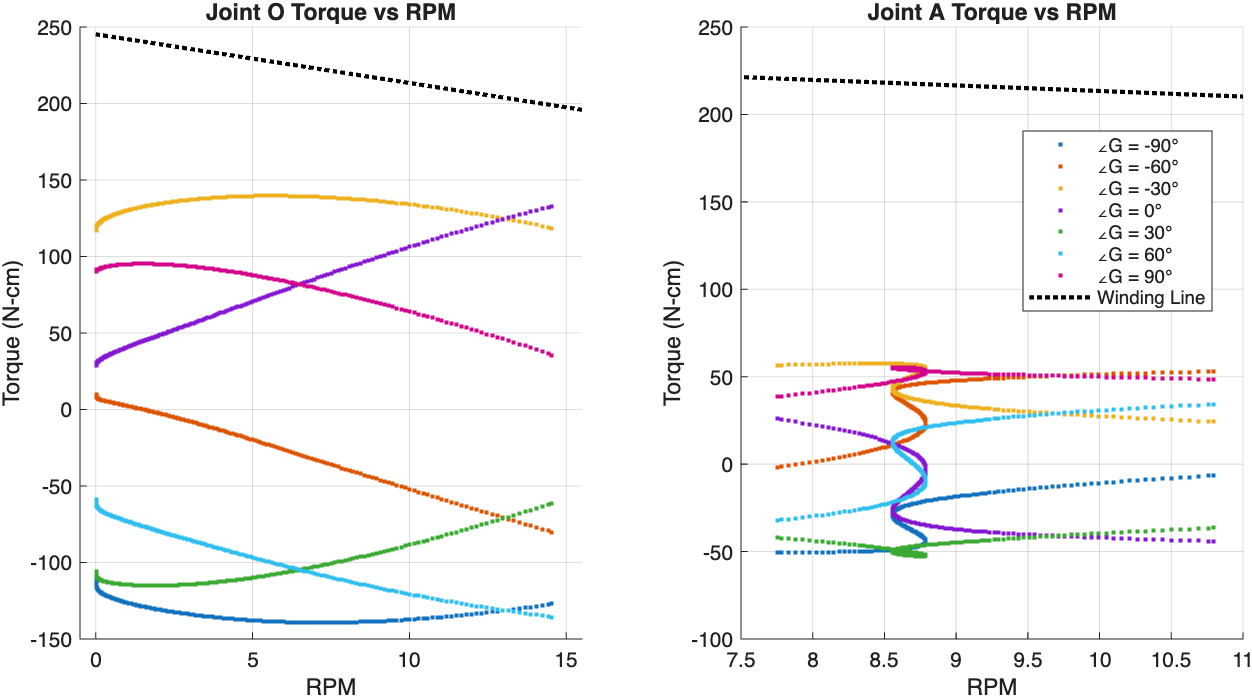
Figure: Dynamic load trajectories (colored) vs. winding-limited operational boundaries (black).
Kinematic Modeling & Workspace Analysis
I developed a MATLAB simulation to identify singularities and unreachable configurations within the workspace.
A sinusoidal path-mapping algorithm projected trajectories onto the climb path, while a workspace constraint-checker dynamically shifted out-of-bounds coordinates into the reachable manifold to maintain fluid stability.
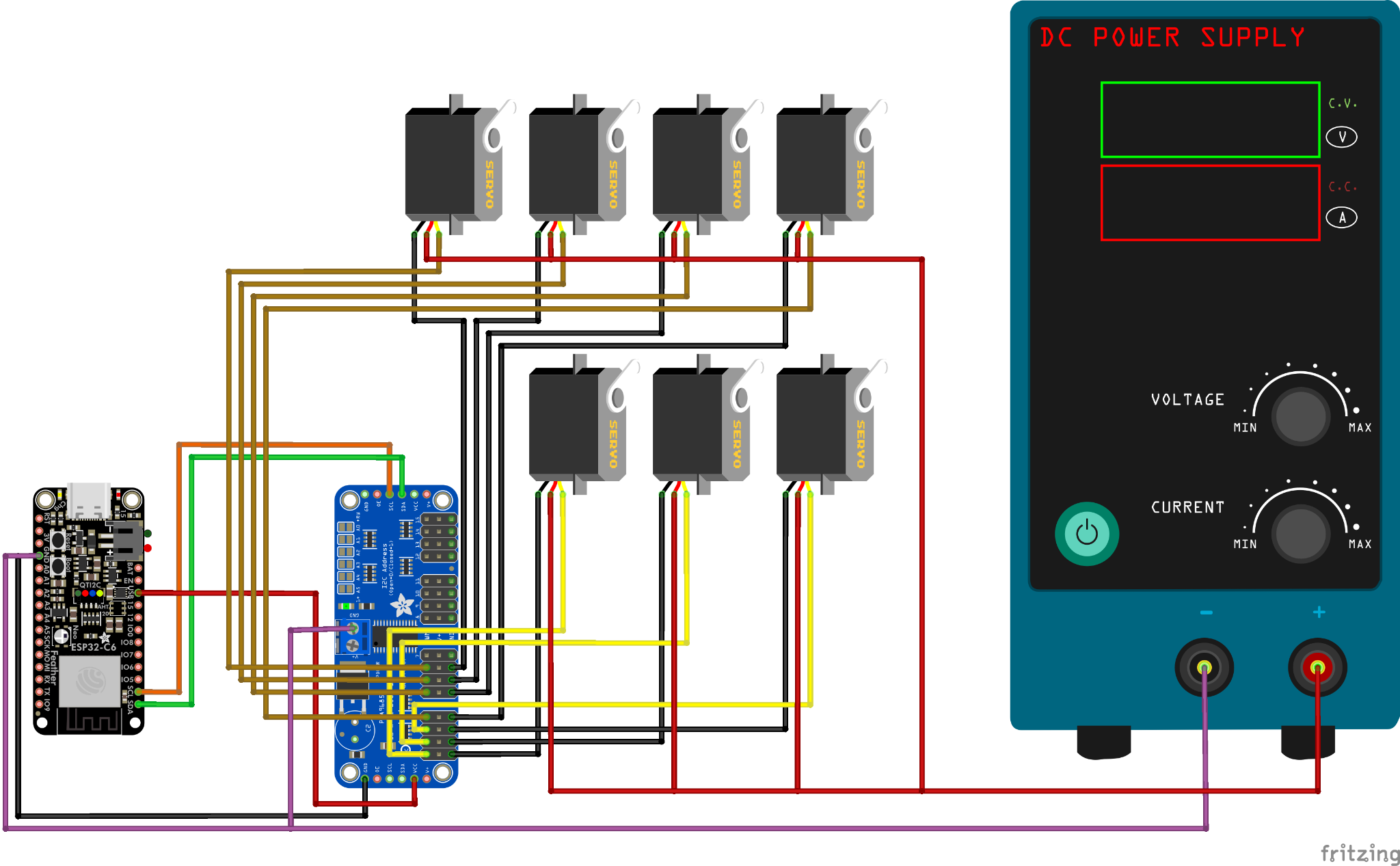
Electromechanical System Design
The control architecture utilizes an ESP32-C6 communicating via I2C to a 16-channel PWM driver. This topology minimizes GPIO overhead and ensures synchronized, low-latency control across the multi-actuator gait.