Eyan Documet
Eyan Documet
Mechanical Engineer obsessed with solving high-stakes, highly-technical problems.
PyroBot Fire Suppression System
Designed to minimize human risk in hazardous environments, PyroBot is a 2.5-DoF robotic turret that utilizes low-level computer vision to detect and extinguish thermal signatures.
I owned the mechatronic design and co-developed the embedded vision pipeline for autonomous operation.
Note: This page is a summary. For full documentation, see 15-page Technical Report and Operations Manual (PDF) documenting the full system architecture.
Skills Demonstrated
- High-Density Mechatronic Integration. Managed a 50+ part assembly, optimizing for volumetric efficiency and center-of-mass stability to ensure smooth 2.5-DoF motion.
- DFMA & Rapid Prototyping. Optimized geometries for FDM production, prioritizing anisotropic strength and minimizing post-processing. Utilized standardized ASME hardware to streamline the BOM.
- Embedded Systems & FSM. Implemented a non-blocking, event-driven architecture on an ESP32. Handled asynchronous sensor polling and high-resolution PWM actuator control.
- Reverse Engineering & Metrology. Disassembled complex COTS devices to extract and repurpose functional subsystems. Utilized precision metrology to validate virtual model accuracy for physical integration.
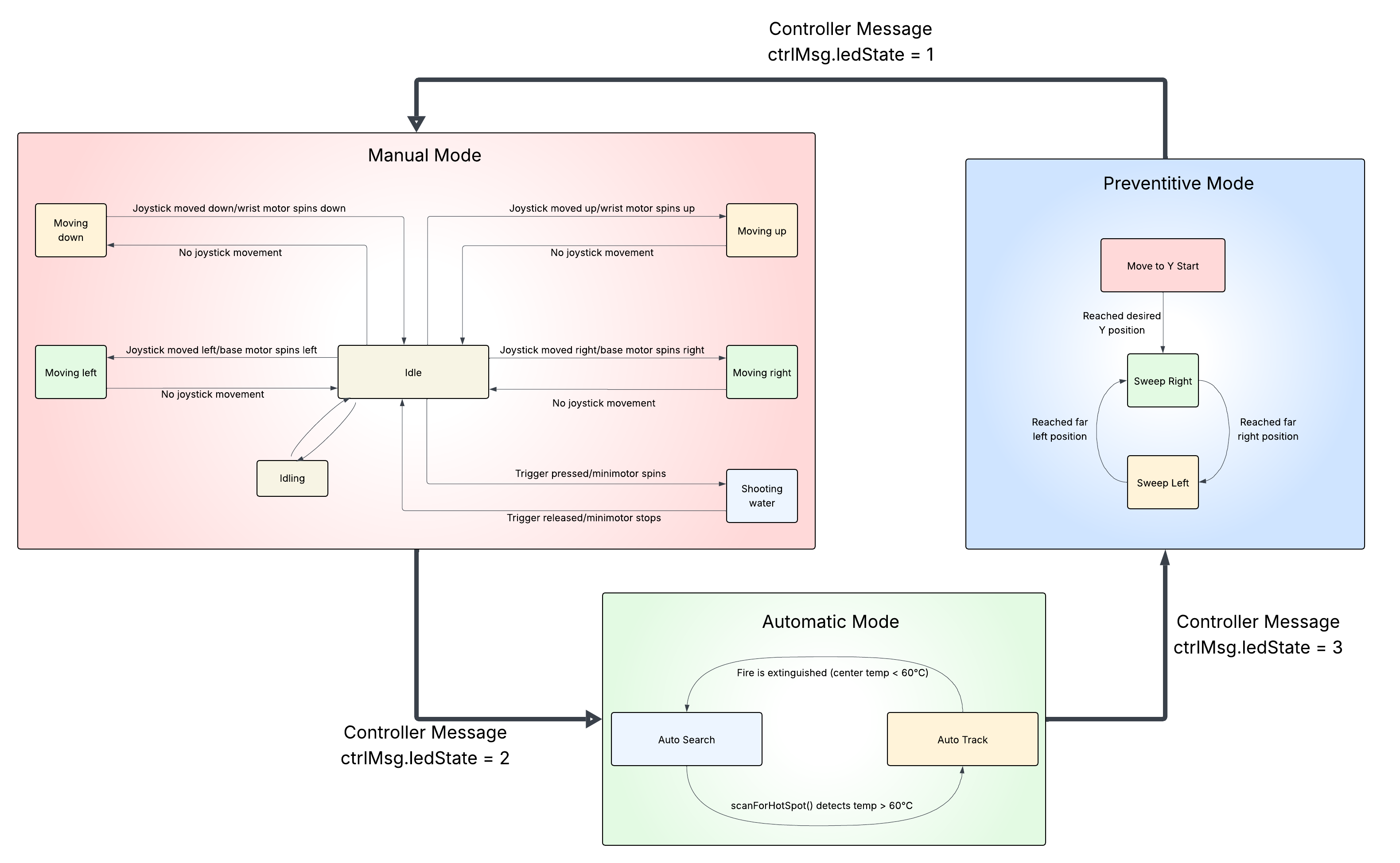
Control Logic and Strategy
The system architecture follows a prioritized control logic managed by an ESP32-based Finite State Machine (FSM). This event-driven architecture allowed the robot to transition seamlessly between passive patrolling and active suppression modes (Automatic, Manual, and Preventative).
Autonomous Heat Tracking
To ensure reliability in remote areas, all processing is performed locally on the ESP32. We utilized an AMG8833 8x8 Infrared Thermopile Array to generate a low-resolution thermal map. I co-developed a pipeline to interpolate this 64-pixel grid and implement peak-thresholding, localizing heat signatures with high angular accuracy at 10Hz.
Reverse Engineering & Integration
To achieve high-velocity suppression within prototype constraints, we performed a full teardown of a COTS electric fluid delivery system. By extracting and characterizing the internal DC diaphragm pump, I was able to establish a Digital Twin in CAD. This allowed for the design of a custom mounting interface that balanced the pump’s mass on the 2.5-DoF arm, reducing actuator moment of inertia and improving tracking stability.
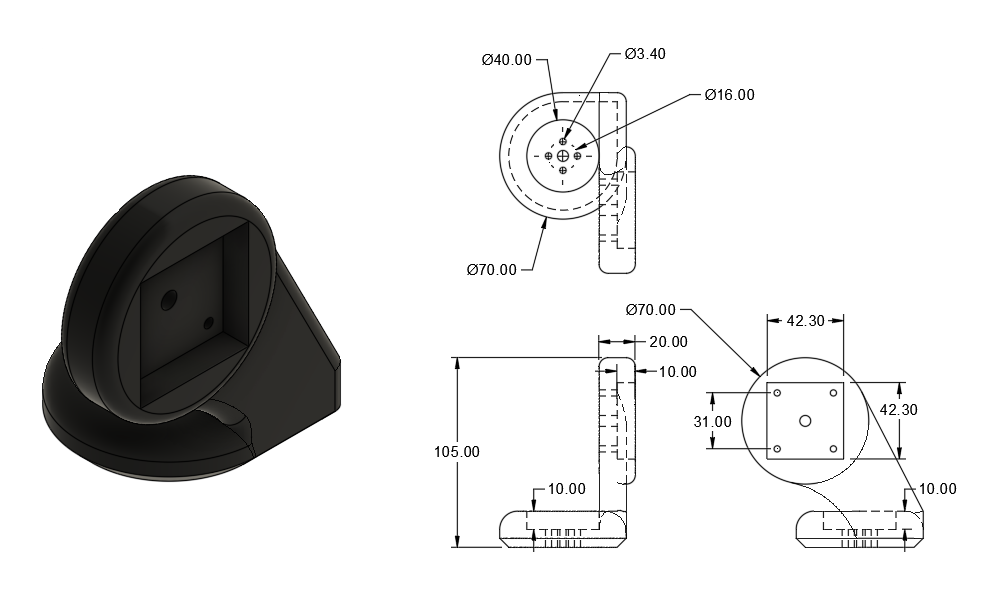
CAD & Layout Drawings
All components were engineered in Autodesk Fusion using a hybrid top-down assembly approach. Designs were specifically optimized for FDM 3D printing, prioritizing print orientation for structural integrity and maintaining 0.2mm tolerances for press-fit COTS integration.